←前一篇 後一篇→
咱uì前一篇知影倒退攄演算法个概念,透過計算圖, 咱會當知影目的就是揣出 +, dot, sigmoid (抑是其他戛火函式) 个倒退攄運算。毋過, 事事項項攏愛uì上基本个所在來起造. 比如講: dot 運算本身乘(*)佮加(+) 整--起來. 這就是 "分而治之" 的手路.
加法倒退攄
若是 z = x + y:
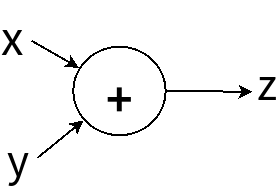
伊的微分是 dz/dx = 1, dz/dy = 1。也都是 x 變 1, z 嘛綴伊仝款變 1. x (抑是 y) 變偌濟, z 就變偌濟。顛倒頭講, z 變偌濟 ,x (抑是 y) 就變偌濟, 所以伊的倒退攄是:

乘法倒退攄
若是 z = x * y, 伊的計算圖 :

伊的偏微分: ∂z/∂x = y, ∂z/∂y = x, 所以, 伊的倒退攄算法是:

咱會使按呢來了解: uì x 這爿來講, 伊小可變化, 對輸出个影響是會有 y 倍。仝款个道理, y 小可變化, 會有 x 倍个變化。咱舉一个實際个例, 比如講: 10 * 2 = 20:
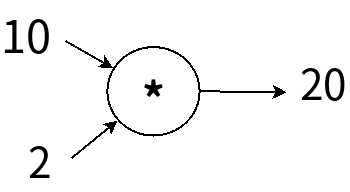

x 爿是 2, y 爿是 10. 這意思是講:
若是 x 變做 10 + 1 = 11, z 會成做 20 + 2 = 22
若是 y 添 1 成做 2 + 1 = 3, z 會變做 20 + 10 = 30.
按呢敢著咧? 咱看覓: 本底 10 * 2 = 20
(10 + 1) * 2 = 11 * 2 = 22 = 20 + 2
10 * (2+1) = 10 * 3 = 30 = 20 + 10
這是完全對同。
到今咱會當了解: 倒退攄演算法, 窮實就是先共基本運算个微分模型算出來。
伊代表个意義是: 輸入个一絲絲仔改變, 會造成輸出偌濟變化! 這就是微分个概念, 精差普通微分是對倒爿算到正爿, 倒退攄是對正爿算轉去倒爿!
動手用 Python 來實作
理論分析了, 咱參考 layer_naive.py: 伊用 class 來共向前行(forward propagation) 佮倒退攄(backward propagation) 敆做伙, 成做一棧: AddLayer() 是加法棧, MulLayer() 是乘法棧. 伊的寫法真直觀, 家己看就知.
伊的倒退攄是 (d表示 delta):
因為 ReLU 佮 Sigmoid 的倒退攄攏是數學, 我就干焦共in的算式寫落來. 詳細按怎算, 你會使去看原作者的書, 抑是其他數學的冊。
ReLU 棧的倒退攄
y = x (if x > 0)
y = 0 (if x < 0)
伊的倒退攄是:
dy/dx = 1 (if x > 0)
dy/dx = 0 (if x < 0)
伊的 Python 實作參考 layers.py 的 Relu Class。
Sigmoid 棧的倒退攄
y = 1/(1+exp(-x))
伊的倒退攄是 (d表示 delta):
dx = y * ( 1 - y) * dL
中方 dL 是 y 彼爿的變化。當然,這咧公式較複雜,經過幾落改轉換。這寡轉換目的是愛佇最後,會使用 y 來表示。因為 y 是彼擺向前行算出來的值, 咱欲攄轉來的 dx 佮伊有關係。
伊的 Python 實作參考 layers.py 的 Sigmoid Class。
